Cuando se habla de la fábrica del futuro (FF) parece inevitable hacerlo a la vez de la robótica humanoide, principalmente por su naturaleza explícitamente colaborativa con las personas (lo de explícitamente por intentar parecer “una persona más”, lo que es un matiz psicológico interesante (*). No son estos robots imperativos en la FF; ni mucho menos, y de hecho, sus aplicaciones prácticas viables son más bien reducidas.
Y no son imprescindibles para hablar de una FF porque lo de verdad importante en ésta es que las máquinas, dispositivos, y las personas intercambien información inteligente y amigable en tiempo real y sean capaces de trabajar de forma sincronizada en todo momento. Esto no es patrimonio exclusivo de estos robots.
que las máquinas, dispositivos, y las personas intercambien información inteligente y amigable en tiempo real y sean capaces de trabajar de forma sincronizada en todo momento. Esto no es patrimonio exclusivo de estos robots.
Pero sí es cierto que el “matiz psicológico” (*) genera un clima más ameno y proactivo en la planta, y si se pueden instalar, hay que intentarlo.
La naturaleza física de un sistema humanoide o antropomórfico (RANT en lo sucesivo) lo hace muy distinto del robot tradicional. Su equilibrio en todo momento es delicado, como el de una persona, pero sin elasticidad ni grados de libertad en sus miembros. Particularmente, el par de elasticidad respecto al centro de gravedad de reacciones de enlace y de fuerzas exteriores que ejerce, debe ser adrizante en todo instante. Y, por otra parte, los mecanismos de las articulaciones que ejercen los pares cinemáticos tienen que ser ligeros y rígidos para tener poca inercia y no generar vibración resonante a baja frecuencia. A más grados de libertad, más ligeros y rígidos, porque hay más probabilidades de resonancia estructural, imprecisión y roturas.
 La conclusión más importante de esto es una limitación en los pesos que son capaces de manipular y, por lo tanto, una restricción de uso en determinados procesos y tipos de industria.
La conclusión más importante de esto es una limitación en los pesos que son capaces de manipular y, por lo tanto, una restricción de uso en determinados procesos y tipos de industria.
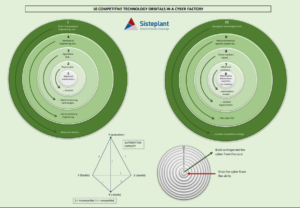
El resultado de los gráficos es que los RANT pueden, en general, levantar pesos  mayores que las personas, pero no mucho mayores. Cuanto más sofisticados, versátiles, flexibles y polivalentes sean (algo que nos interesa mucho en la FF), soportan menos capacidad de esfuerzos.
mayores que las personas, pero no mucho mayores. Cuanto más sofisticados, versátiles, flexibles y polivalentes sean (algo que nos interesa mucho en la FF), soportan menos capacidad de esfuerzos.
Esta es su relativamente frágil naturaleza (obviando el nada despreciable problema de lo intrincado de su matriz de transformación cinemática inversa y la solidez necesaria de su software). Entonces, ¿cuáles son las áreas de aplicación más viables? Son claras:

Pero debemos matizar. ¿Pueden llegar a actuar, por ejemplo, suplantando a un AGV? Sí, si las cargas lo permitieran, pero no tendría ningún sentido: son más sofisticados y bastante más caros en relación a su velocidad de procesado efectivo de trabajos. Bajarían de precio, sin duda, con el aumento de su demanda, pero cada cosa es cada cosa, y lo mejor es ceñirlos al campo de sus habilidades específicas; el recuadro anterior. Recuadro que se da con naturalidad en fabricación de vehículos, aeronaves, farmacia y laboratorios son ejemplos claros.
Una vez identificado su destino en una fábrica debemos ver porqué se pueden justificar. Y en efecto, son interesantes por las siguientes razones:
- Polivalencia y flexibilidad de tareas, soportando, como los humanos, el cambio de diseño de productos (reprogramación muy sencilla), y tiempos cero de set-up entre distintos tipos de trabajo y series ultracortas o unitarias.
- Ahorran, por consiguiente, una gran cantidad de útiles y herramientas específicas (a mayor automatización de la planta, más ahorro), y así se maneja una fábrica más versátil con menos restricciones.
- Lo mismo con sistemas auxiliares de manipulación y sujeción del producto (para que el robot lo encuentre en una posición fijada); los RANT tienen un potente sistema de visión a bordo, y admiten posiciones caóticas para el “picking&place”.
- Facilitan, también como consecuencia, la rápida industrialización de nuevos productos y sus cambios, algo decisivo para competir hoy.
- Acceso muy versátil (casi tanto como una persona) y trabajo en cooperación interactiva en tiempo real prácticamente permanente y sin límites.
- Eliminar casi todas las restricciones que exijan al lay out de planta los sistemas robóticos tradicionales.
- Generar un “buen clima” que favorece la implantación de una diversión y motivación con la tecnología, que es una pieza clave en la FF.
Pero cuando vamos a calcular el pay-back, no se puede operar de la forma tradicional por “ingreso marginal de la inversión = coste marginal de la MO desplazada”. Además se ser una aberración conceptual para concepción de la FF, es profundamente incompleto, porque ésta es mucho más sutil. Entonces, tenemos que contemplar otros aspectos:
a) Los elementos a considerar como retornos de la inversión son los 7 que acabamos de ver, que deben cuantificarse de manera “holística” ente ellos, y no puramente aislada, pues sus relaciones son fuertemente interdependientes.
b) No se trata de justificar un RANT (o varios) de manera aislada, sino como parte de un concepto integrado mayor: puede que una célula real o virtual en el contexto de la FF que queremos hacer (o puede, mejor, que la FF como conjunto).
c) Mejor usar un método “temporal” para el cálculo. Recomiendo una combinación entre el método de VAN-TRI (conocido) y los árboles probabilísticos de decisión (también conocidos). Ambas herramientas mucho más apropiadas para calibrar un sistema complejo y sofisticado, con visión a largo plazo, como es la FF.
No hacerlo así es profundamente miope.
Finalmente, la siguiente figura enseña dónde se enmarca la robótica antropomórfica, y la tecnología de fabricación colaborativa 4.0 en general, en la FF; en los niveles 2 y 3. Pero existe un alma-guía estratégica, muy precisa y sutil, representada en el nivel 1 por los muelles entre elipses, y que es objeto de otros artículos míos.
Autor:
Javier Borda Elejabarrieta, Dr. I.I., Msc. y MBA; Presidente y C.E.O. de Sisteplant. Profesor de la ETSII de Bilbao (Aula Aeronáutica) y de la Universidad Juan Carlos I, (logística para Defensa).